Postupné oživování a testy:
V tomto článku se budu snažit popsat další průběh stavby našeho čítače FC-1300 a pomocí řady měření ověřím, zda naše řešení kmitočtového standardu GPSDO dostačuje svými parametry pro naše aplikace.
Při postupném oživování a testech jednotlivých částí, jsme narazili na problém se stabilitou ladícího napětí OCXO. Fázový závěs funguje správně, po uzamčení PLL napětí osciluje kolem střední hodnoty. To je sice podstata funkce takovéto stabilizace, ale my se snažíme co nejvíce tuto chybu omezit a docílit co nejmenší změny napětí. Výstup XOR hradla IC3B totiž dává jen dvě velikosti napětí 0V nebo 5V. Kondenzátor v integračním článku C24 se tedy buď nabíjí nebo vybíjí. Není tam nikdy stav, kdy by se napětí neměnilo.
Úpravy integračního článku:
Časová konstanta integračního článku R18+C24 musí být zvolena vhodně dlouhá. Laboroval jsem s hodnotami mezi 50ms a 40s. Nakonec se jako nejlepší jevily nejdelší časy.
Tedy hodnoty odpovídající R18=100k, C24=100μF.
Kmitočtovou stabilitu jsem poté odečítal z napěťové změny na výstupu operačního zesilovače U3.
Napěťová chyba v mV zhruba odpovídá kmitočtové chybě v mHz.
Δf ≈ ΔU [mHz,mV]
Po zahřátí a stabilizaci parametrů, napětí osciluje kolem střední hodnoty s chybou až ±3mV. Každý OCXO má trochu jiné napětí, při kterém se “uzamkne PLL”. V mém případě se je jedná o dva exempláře OCXO Trimble 34310-T a Trimble 34310-T2, to je 4,45V a 7,75V. To si vysvětluji jak jinou verzí, tak odlišným stárnutím každého oscilátoru. V konstrukci je na tento problém pamatováno. Stačí změnou hodnot rezistorů R5+R11 přenastavit hodnotu zesílení operačního zesilovače U3.
Taktovací “clock” signál z GPS přijímače má skutečně velmi přesný kmitočet. Jeho stabilita je až 3×10-13 Hz (přesnost Cesiových hodin). Problém je však v tom, že je tento signál zatížen fázovým šumem. To znamená, že se fáze hodinového signálu “náhodně” posouvá, ne o mnoho, přesto ano. Osciluje kolem “nulového bodu – uzlu” v intervalu asi 22ns. Tato chyba se v telekomunikacích nazývá “Jitter“. Při délce periody hodinového signálu 1MHz (T=1μs) je to vlastně 2,2% chyba. Fáze tedy “šumí” kolem “nuly”. Naproti tomu krystalový oscilátor, který je v OCXO, má velmi malý fázový šum. Jeho kmitočet však nebude tak přesný jako je signál z GPS.
Fázový šum je nežádoucí vlastnost všech harmonických oscilátorů, která je způsobena hlavně krátkodobou frekvenční nestabilitou. Každý oscilátor je frekvenčně nestabilní, tato nestabilita se pak určuje v příslušném časovém intervalu. Dlouhodobá nestabilita se určuje v rámci hodin, dní nebo let. Krátkodobá nestabilita je definována na intervalu od zlomků sekund až po minuty. Příčinou krátkodobé nestability jsou různé druhy šumů a jejich vzájemné kombinace. Jedná se například o termální šum, výstřelový šum, blikavý šum, apod. Na oscilační frekvenci se tato nestabilita projevuje jako náhodná fázová modulace s malým zdvihem. Frekvence, na které se fázový šum měří, je označována jako offsetová frekvence. Obálka fázového šumu je osově symetrická s osou na nosné frekvenci.
V tomto zapojení tedy kombinujeme vynikající dlouhodobou stabilitu GPS signálu s vynikající krátkodobou stabilitou OCXO oscilátoru.
Jako modifikaci jsem snížil pracovní kmitočet PLL smyčky z 1MHz na 100kHz. Při kmitočtu 1MHz docházelo k zákmitům ve stabilizaci a řídící napětí VCO mělo chybu i ±25mV. Při delších pulzech se také kondenzátor C24 stíhá nabíjet na vyšší napětí a můžeme použit ještě delší časy RC článku.
Pokud byl použit kmitočet menší, tedy 100kHz – relativní fázová chyba klesla na 0,22%, také rozptyl ladícího napětí.
Možná další vylepšení:
Velikost fázového šumu nám tedy degraduje stabilitu našeho GPSDO, proto jej chceme dále redukovat použitím vhodného GPS přijímače. V současné době používáme GPS přijímač NEO-7M, který je relativně levný, má však vyšší fázovou chybu.
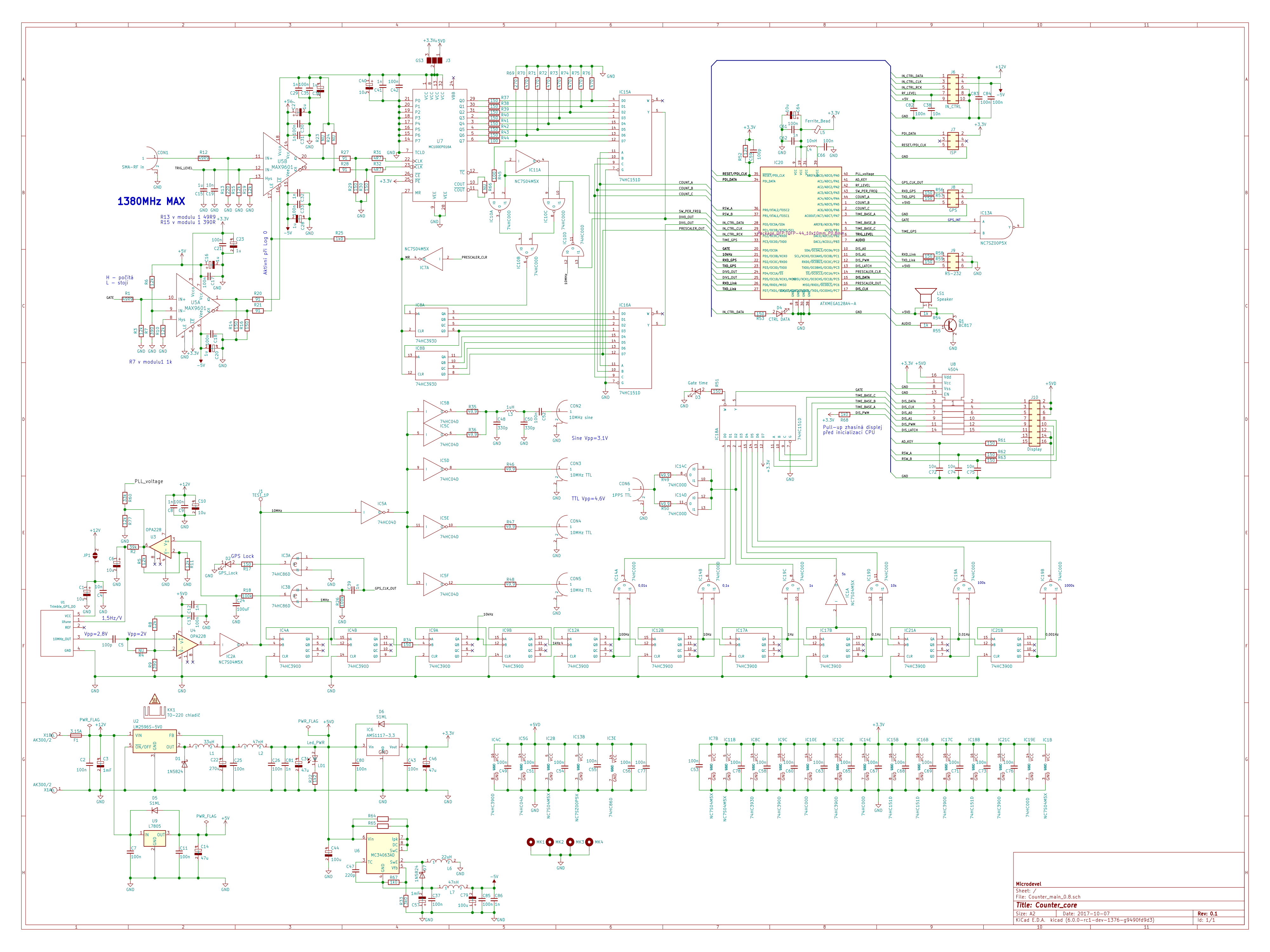
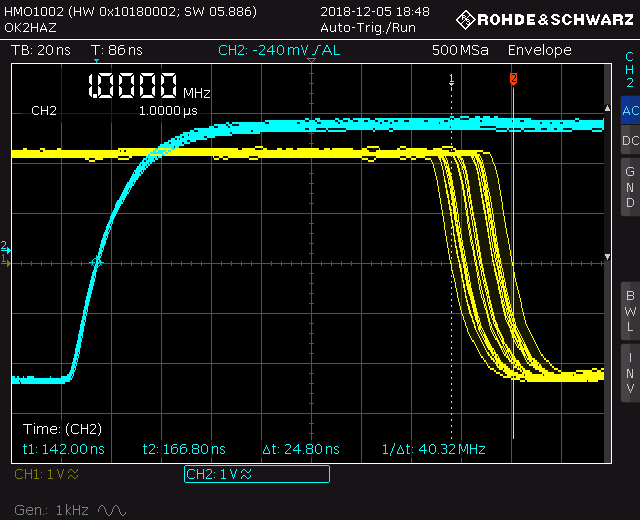
Na následujících obrázcích můžeme vidět velikost fázové chyby. K synchronizaci / triggeringu byl použit signál z OCXO (modrý), žlutě je znázorněn clock signál z GPS.
Na těchto obrázcích vidíme velikost fázové chyby asi 22ns.
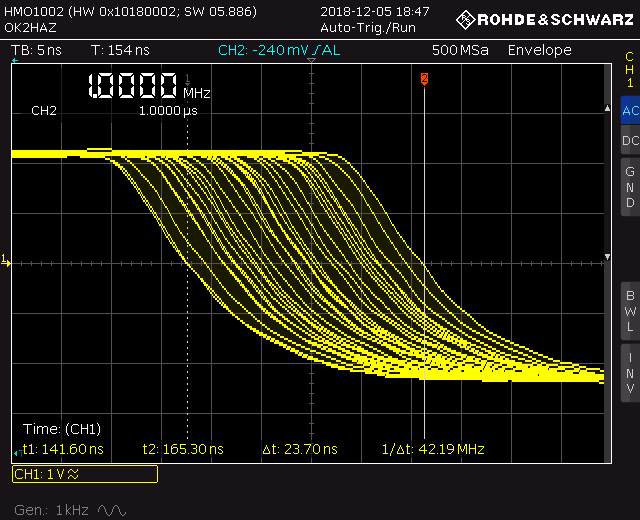
Velikosti a největší zdroje fázových / časových chyb:
Existují tzv. “časovací” modely GPS přijímačů s označením “T”, které mají fázový šum menší. Jinou možností je přepnout GPS přijímač do “survey in”, kdy je pozice známá a chceme pouze časovou synchronizaci. V tomto režimu stačí pro příjem pouze jedna družice.
LEA-NEO-6T_ProductSummary_(UBX-13003351)
Dalším nápadem, jak získat stabilnější referenční kmitočet, je generování ladícího napětí OCXO přímo DAC procesoru AtXmega128. Ten disponuje 12bit DAC. Když napětí vhodně zesílíme, dostaneme ladící krok cca 0,61mV.
Idea je tato: Pomocí INT vstupu GPS přijímače (vstupu přerušení) dostaneme přesnou časovou značku události. Toto budeme spouštět, dejme tomu každou celou sekundu. Z rozdílu mezi značkami dopočítáme chybu. Delšími měřeními můžeme chybu kvantifikovat a měnit podle ní ladící napětí OCXO.
Měření stability s Rb oscilátorem:
Při měření kmitočtové stability je třeba mít vhodný kmitočtový normál pro srovnání, minimálně o jeden řád přesnější než je měřený signál.
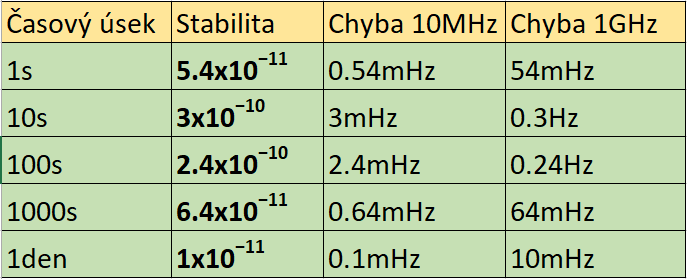
Pro názornost srovnání jednotlivých standardů v tabulce:

Potřebná míra stability je vždy svázaná s danou aplikací. Pro práci na krátkých vlnách nám stačí obyčejný krystalový oscilátor (XO). Na VKV pak teplotně kompenzovaný (TCXO). Na mikrovlnách bude třeba OCXO nebo GPSDO, pro správnou funkci sítě GSM + 4G potřebujeme Rubidiový standard. Abychom mohli odečítat přesnost polohy z GPS na 2m, potřebujeme Cesiové hodiny.
Míra stability / koncentrace se velmi často uvádí pomocí podílu např. milionu. 1PPM je tedy odchylka 1/1 000 000, 1PPB pak 1/1 000 000 000 atd. viz tabulka.

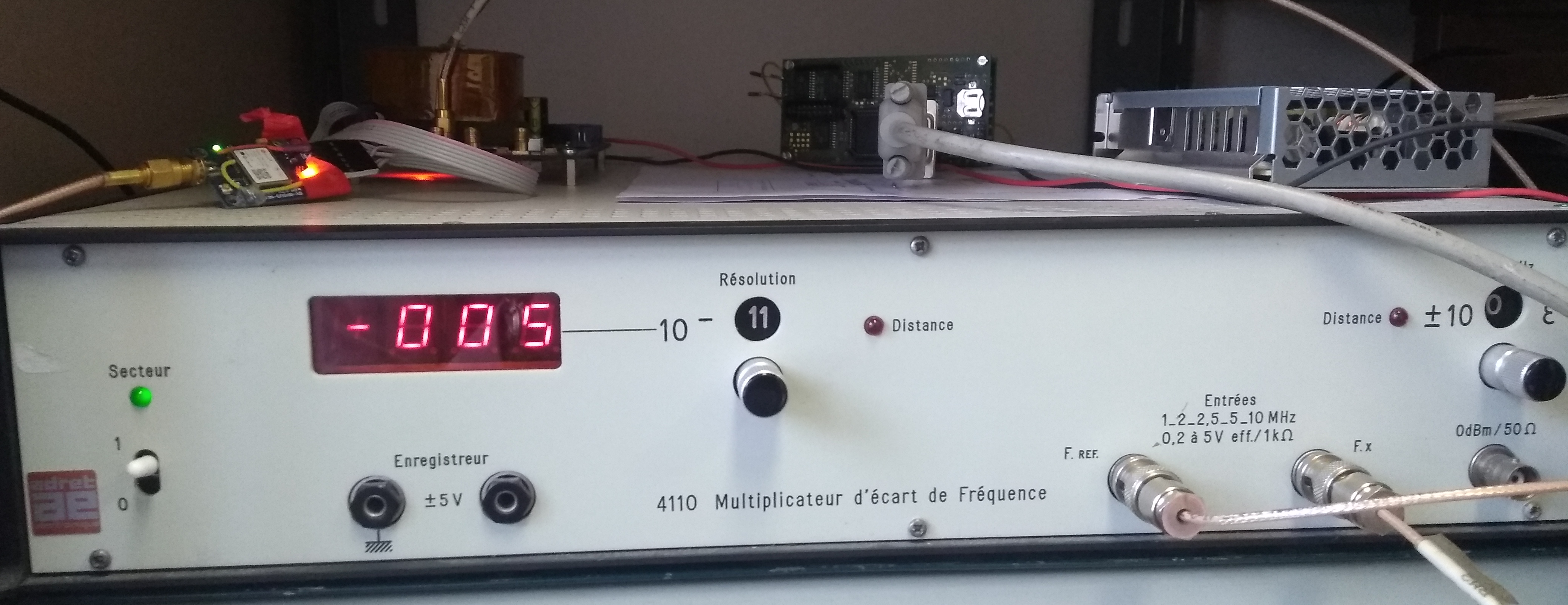
Jako etalon kmitočtu jsem použil Rubidiový kmitočtový normál “Efratom FRK-LLN-1A1B1A”. Pomocí měřiče odchylky Adret 4110 (díky Michalovi OK3ZM), jsem mohl měřit odchylku těchto dvou kmitočtů. Měřič odchylky má dva vstupy. Na jeden se přivede normálový signál (Rb) a na druhý měřený signál v našem případě GPSDO.
Rubidiový standard má stabilitu σ pro čas 1dne cca 1×10-12 Hz.


Samotné měření bylo automatizováno. Naměřené odnoty z odchylkoměru Adret 4110 se vyčítaly pomocí sériové linky do počítače, kde se každou sekundu ukládaly v TXT souboru (opět díky OK3ZM). Na takto získaných datech pak byla provedena matematická analýza. Zde jsem použil program Stable32. Autorem tohoto SW je pan William Riley, který jej poskytl bezplatně komunitě zabývajicí se časovými odchylkami. Program je přímo určen pro analýzu frekvenční stability oscilátorů a výpočet jejich chyb (Allanova variance, kmitočtový drift, stabilita, šum apod.)
Dosažené výsledky měření:
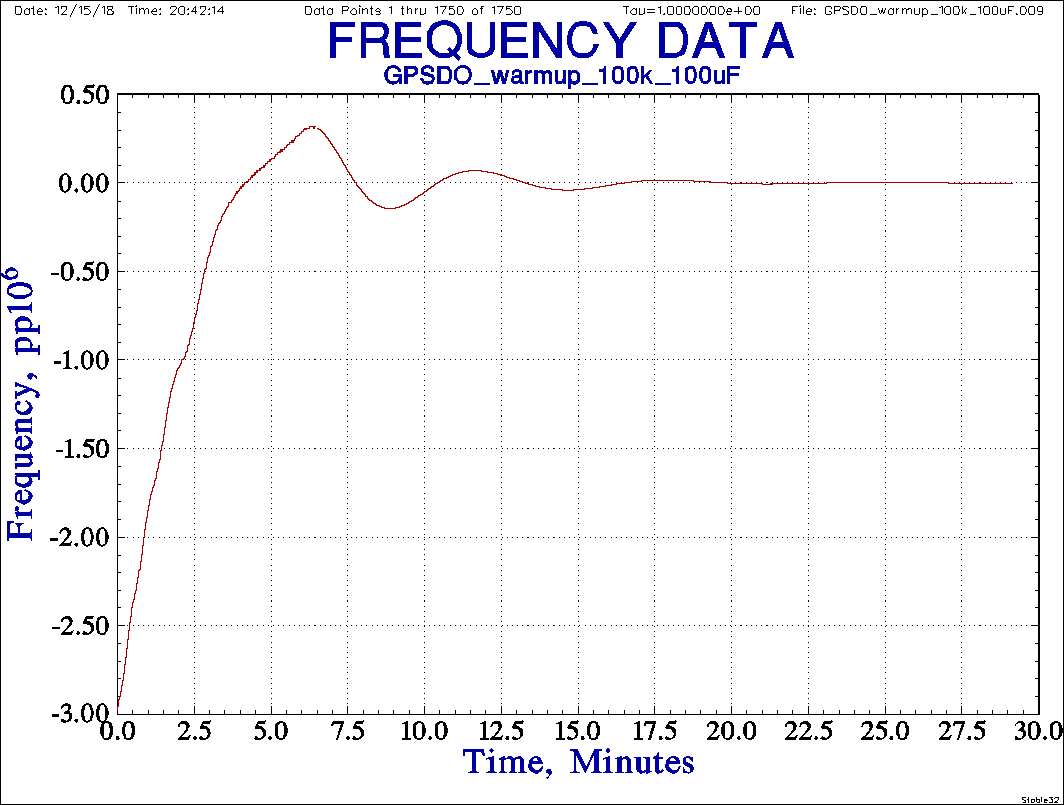
Prvotní nahřívání OCXO trvá přibližně 20min, průběh je vidět na tomto grafu:
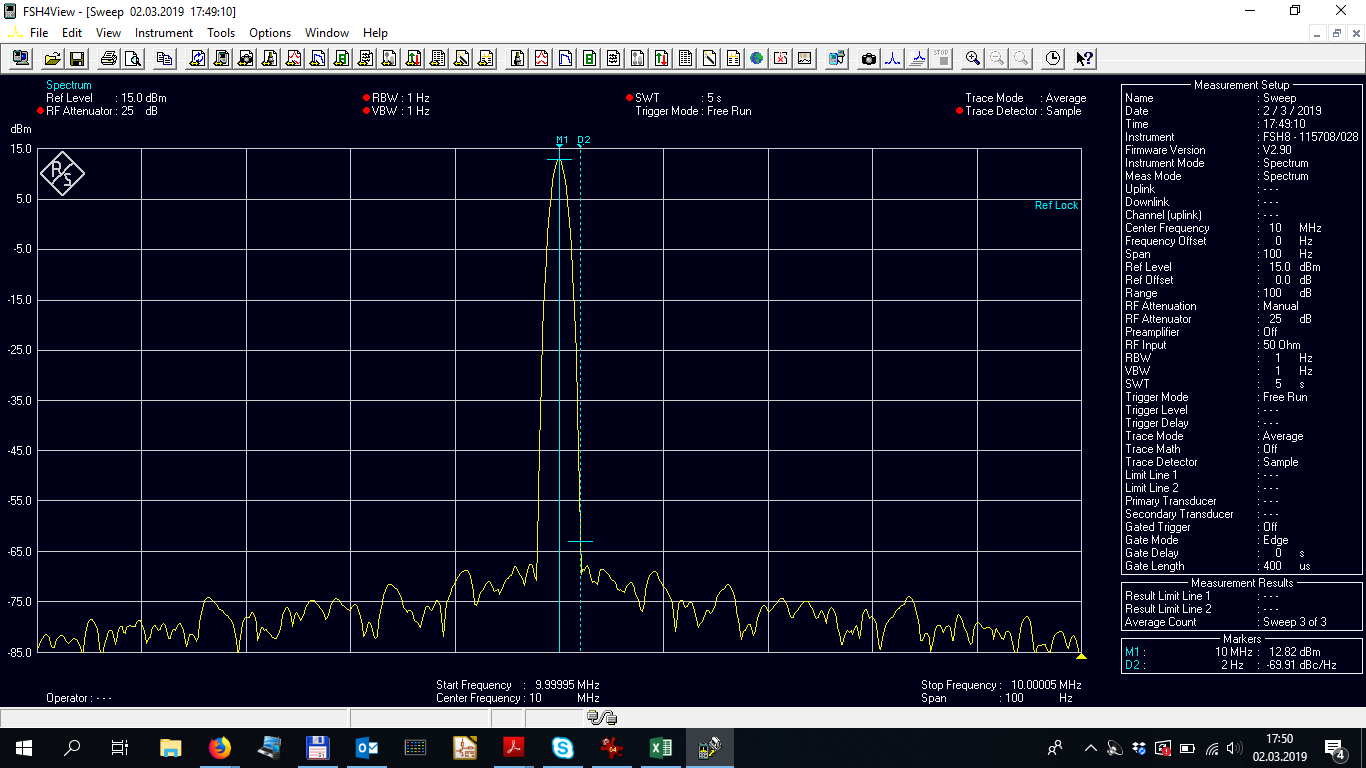
Na následujícím obrázku vidíme obálku spektra fázového šumu, zatím změřeno pouze spektrálním analyzátorem. Tato metoda má řadu omezení, nevýznamější je skutečnost, že měříme složenou funkci fázového a amplitudového šumu. Dále jsme limitováni vlastním šumem LO lokálního oscilátoru spektrálního analyzátoru.
Změřená hodnota fázového šumu je ve vzdálenosti 2Hz od nosné cca -70dBc/Hz.
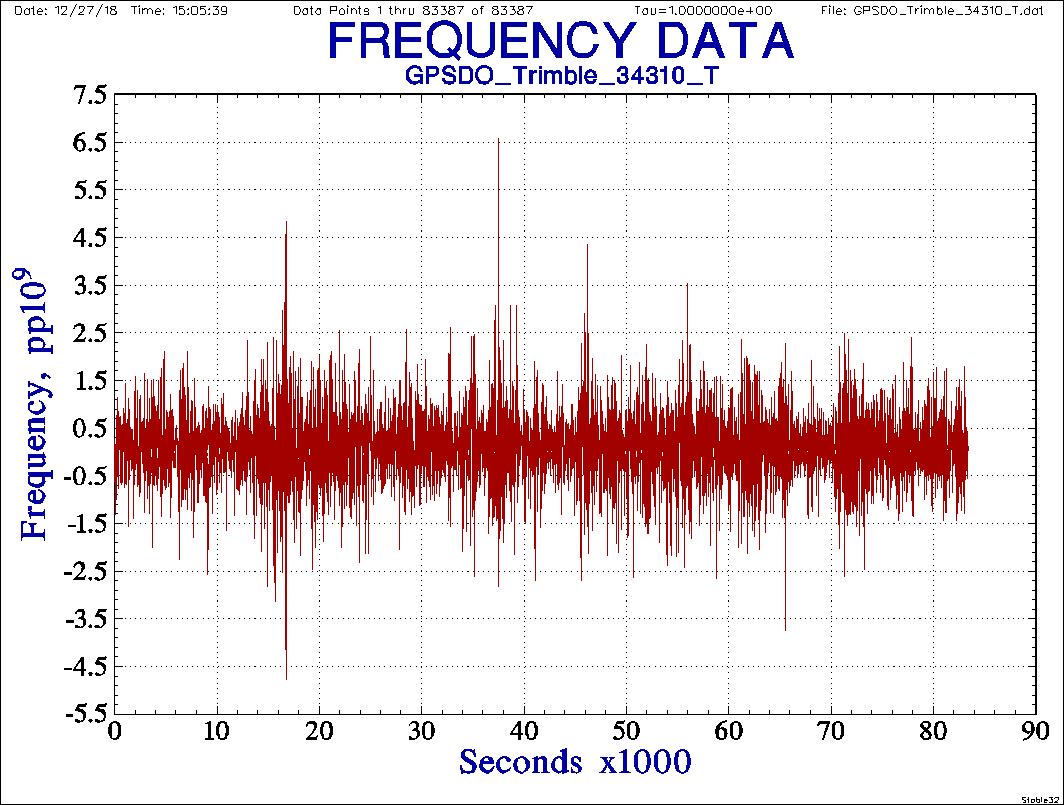
Změřené odchylky od kmitočtového normálu 10MHz jsou vidět na následujícím grafu:
Pro analýzu stability byla použita překrývající se Allanova variance – to je
univerzální a široce využívaná metoda. Používá se pro zvýšení přesnosti normální Allanovy variance. Je založena na výpočtech, které využívají některé stejné (překrývající se) vzorky, přičemž je možno využít jakkoli velký soubor překrývajících se dat. Zvyšuje se tak přesnost výpočtu stability, ale zvýšená přesnost vyžaduje větší výpočetní výkon a větší dobu zpracování.
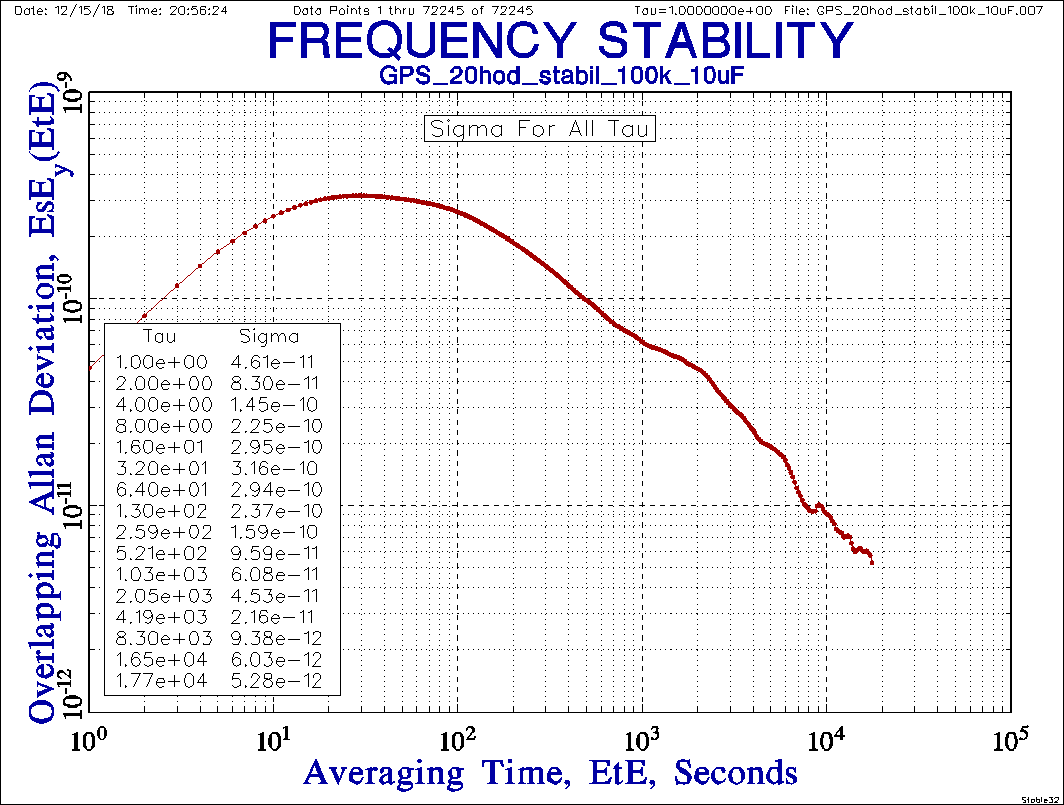
Na následujícím obrázku vidíme hodnoty stability GPSDO pro jednotlivé časy Tau, PLL smyčka běžela na 100kHz.
Samotný krystalový oscilátor OCXO vykazuje po nahřátí takovouto stabilitu:
Ladící napětí bylo nastaveno fixně pomocí víceotáčkového trimru.
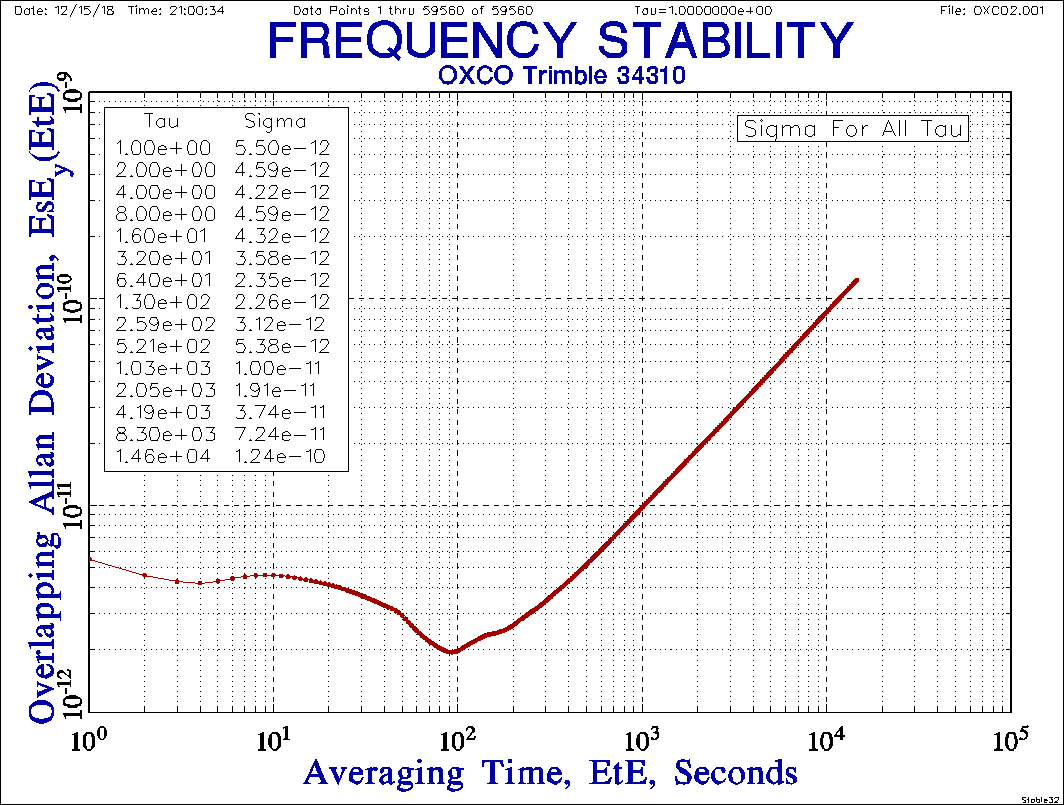
Na grafech vidíme, že GPSDO má na časech <100s stabilitu ≈ 3×10-10 , zde se projevuje náš problém se stabilitou ladícího napětí (chyba ≈3mV). To však pro měřící rozlišení našeho čítače FC-1300 s rezervou postačuje. Krystalový oscilátor má naopak v časech 1∼100s stabilitu ≈3×10-12 Hz. Na delších časech se již nepříznivě projevuje kmitočtový drift (který je v GPSDO kompenzován).
Jak jsem již uvedl, stabilita našeho GPSDO normálu plně postačuje pro zamýšlené využití v našem čítači. Pokud bychom však potřebovali kmitočtový normál přesnější, konstrukci bych modifikoval a ladící napětí VCO generoval pomocí cca 16bit DAC převodníku.
Co nemohu opomenout zmínit je, že při měření jsme se již dotýkali hranic přesnosti Rb oscilátoru coby etalonu kmitočtu. Na měřeních byla poznat i nepatrná změna teploty v místnosti.
Tabulka s hodnotami σ pro příslušné časy Tau:
Pokračování …
Krásná práce – gratuluji. Z metrologického hlediska bych si dovolil doplnit pravdivou poslední větu, že jste se nedotýkali hranic jen Rb oscilátoru, ale také měřící techniky. Jen na okraj jsem kdysi ověřoval kvality osciloskopů a tak jsem, mimo jiné, použil dva Rb oscilátory a prováděl jsem to samé, co ve vašem případě – jeden oscilátor synchronisoval jednu stopu a na druhé stopě jsem pozoroval druhý oscilátor. A byly zajímavé výsledky. Také se projevil fázový posuv. Pravda u 1 GHz osciloskopu to bylo ke dvěma nsek. U “levnějších” osciloskopů (kolem 100 MHz) to bylo více – až 5 nsek. Tedy i osciloskopy mají svoji chybu, k tomu OP, hradla, komparátory atd., atd. Tedy opravdu “na dno”. Ale skvělá práce.
Ale já pátrám spíše ze zvědavosti (lépe řečeno z neznalosti), jaký je ten “zašifrovaný” kmitočet, co vysílají GPS družice. Na wikipedii jsem se dokonce dočetl něco jako frekvence 10,23MHz (Družicové hodiny….). Stále jsem nenašel odpověď, který kmitočet (pomocí software – pin 3) dělí příjmač NEO-M7? Je jasné, že se píše “když není zasynchronisován tak je tam kmitočet 1 Hz a po zasynchronisování” se tam na pinu 3 “objeví” kmitočet “dle přání”. Ta dělička je programovatelná v tom příjmači a který kmitočet dělí? To mě jen principielně “vrtá” hlavou.
Ještě jedna prosba. Neznáte autora článku “GPS jako zdroj přesného kmitočtu” OK1DXD? Ten pán tam popisuje, jak si nahrát ovládací software z webu O-blox s názvem U-centr v.XXXX. A jelikož jsem úplný blb v programování, tak bych se jen rád zeptal, že je již asi nová verze programu – U-centr v. 18.11, která nemá ty obrázky uváděné v článku – tabulka nastavení “Time Pulses” (asi dřívější verze). Chtěl bych se zeptat, kde se to v té nové verzi nastavuje (kmitočet na pinu 3). Jistě to asi sám víte, ale už jsem se dost naotravoval. Děkuji za trpělivost. K.
Díky moc, ale ještě je na chválu brzy. Zbývá spousta práce v programování, také bude třeba dodělat mechanickou konstrukci a třetí verzi vstupního modulu:)
S chybou osciloskopu máte samozřejmě pravdu, úplně jsem na ni zapoměl a to je špatně.
Princip generování kmitočtu v GPS přijímači jsem podrobně nestudoval, v dokumentacích co mám to tuším ani popsané není. Zkusím to zjistit, samotného mě to zajímá.
Tomáše OK1DXD samozřejmě znám, je to výborný konstruktér. Váš problém jsem teď řešil také, chce to sehnat starší verzi, tam nastavení Time Pulse zůstalo.
Zkuste tento odkaz, mělo by to jít:
https://www.u-blox.com/sites/default/files/u-centersetup_v8.16.zip
Program od U-blox využívám sporadicky, NEO-7M řídíme pomocí AtXmega128.
Moc děkuji za ten odkaz. Tam to skutečně ještě je. Zatím mě nedošel ten modul NEO-7M a tak pak to zkusím. Děkuji za všechny rady předané v tomto roce a přeji Vám krásné vánoce a v novém roce hodně nápadů a zdárných konstrukcí. A promiňte mě moje otravování. Já jsem strojař a elektroniku mám jako “koníčka” (akustiku a měřidla – ta dělám ve svém oboru profesionálně – nanometr “žádná míra”). Doufám, že se budu moci ještě v novém roce na Vás obrátit o radu. Snad ještě jedna předběžná prosba. Bylo by možné od Vás získat (samozřejmě za peníze) nějaký ten procesorový obvod s uloženým programem pro to NEO-7M? Já programovat neumím a mikroprocesory jsou pro mě “černé skříňky”. Děkuji a už končím. K.
Díky moc, také přeji vše nejlepší a mnoho úspěchů do roku 2019:)
Program k čítači poskytneme na vyžádání emailem, to není problém.
Ahoj Michale,
nastavení Timepulse TP5 v nové verzi u-center 18.11 jsem shodou okolností teď o svátcích také hledal. Je tam vtipně schováno pod menu: Messages View – UBX – CFG – TP5.
Tam už je k vidění staré dobré nastavovací menu, na které jsme zvyklí. Nové verzi konfiguračního menu Generation 9 Configuration View je třeba se vyhnout, je asi určena jen pro nové moduly a s NEO7-M neumí pracovat.
73 a HNY 2019
Petr OK1AYU
Děkuji za přání a máme nový rok před sebou a já se zase ozývám. Nemám se s kým poradit a tak Vás zase otravuji s prosbou. Hraji si s tím “kmitočtovým normálem” (už “chodí”) a při tom jsem narazil na podivnou věc, kterou si nedovedu vysvětlit. Koupil jse si na e-Bay několik OCXO a mezi nimi jeden “Bliley NV47A1282 – 10MHz Sine Wave”, který vytváří opravdu velmi čistou sinusovku. Potud vše vpořádku. Ale nedovedu si vysvětlit, jak je možné, že je napájen 5V a na HF výstupu je napětí 22,6 Vpp (kolem 7,9 Vrms). Vím, že jste v tomto oboru špička se znalostmi a tak se na Vás obracím o vysvětlení. Jen pro úplnost – nejedná se o žádnou chybu měření, nebo nevhodná sonda u osciloskopu a jiné “dětské” chyby. Porovnával jsem to se zobrazení z generátoru RIGOL DG4162 (jde do 160 MHz), osciloskop je 300 MHz, sonda rovněž 350 MHz atd., v měření to není. Přitom výstup na OCXO mohu zatížit i 100 ohmama a napětí je “tvrdé”. Jak se tam to vysoké napětí “vyrobí”?? To mě zase nedá spát. Ostatní OCXOčka mají výstup obdélnikový a také odpovídající napětí 5 Vpp. Nezlobte se, můžetemě poučit? Děkiji moc. St.
Zdravím,
asi Vás zklamu ale problém s měřením bych přeci jen viděl. Vámi zmíněný OCXO Bliley NV47A1282 má výstupní impedanci 50Ω. Jeho katalogová výstupní úroveň je min. +8dBm, dejme tomu 10dBm max tj. 2Vpp/ 0,707Vrms. Je velký rozdíl tyto úrovně měřit na 50Ω ,nebo 1MΩ jako na osciloskopu (Top samé platí o 1MΩ osciloskopické sondě). Takzě zkuste u osciloskopu mít 50Ω terminátor, třeba zapojený pomocí T-čkové BNC spojky.
Dále je třeba zkontrolovat nastavení osciloskopu: Je v menu osciloskopu (Probe) nastaveno zesílení 1x, nebo jiná hodnota? (Mě se to například stalo:)) Standardně tam bývá hodnota 10x nebo 100x.
Omlouvám se a hluboce se stydím. Vůbec jsem si nevyhledal katalogový list a tak se jen stydím. Máte (jako vždy) úplnou pravdu. Stačilo jen na osciloskopu přepnout vstupní impedanci na 50 a hned tam byla hodnota 5,6Vpp. Tak se znovu omlouvám.
Když už Vás zdržuji, mohl byste mě (až budete mít čas) vysvětlit k čemu jsou dobré OCXO se sinusovým výstupem? Ten sinus je tak krásný na tom Blileji, že žasnu. Je takové sinusové OCXO použitelné např. v tom kmitočtovém normálu? Nebo je nutné jej “prohnat” přes obdélník? Zajímalo by mě, jak ten sinus vytváří. Počátek je jistě v obdélníku a pak asi filtrama z toho udělají sinus. Ale je to jistě podstatně složitější, než obdélník a přece to dělají. K čemu je to vhodné? Promiňte mi tu stálou zvědavost. Díky.
Dobrý den,
úplně v pořádku, není proč se omlouvat. Tohle jsou už celkem speciality. Jen napětí 5,6Vpp je stále podezřele vysoké. Co se týče tvaru signálu, u takovýchto oscilátorů je velmi duležitým faktorem čistota signálu. Myslím tím minimální fázový šum a hlavně minimum harmonických. Obdélníkový nebo pilový signál je v podstatě složen jen a pouze z lichých/sudých harmonických signálů sinusových. Takže pokud má OCXO poskytovat kvalitní signál pro synchronizaci, bude vždy cílem aby měl pouze jeden hlavní signál s minimem harmonických, nebo ostrých přechodů. Proto ta čistá sinusovka. Vnitřní zapojení bohužel nemám, pokusím se jej někdy vykreslit z vadného-rozebraného kusu.
Promiňte, ale mohu ještě trochu diskutovat? Tak mě ten kmitočtový normál zaujal (čistě teoreticky – přesný kmitočet nepotřebuji), že jsem začal studovat PLL závěsy a také jsem prakticky měřil jednotlivé OCXO a TCXO v reálném zapojení a mám takové provokativní závěry, které bych rád konzultoval s odborníkem. Já bych v případě Vašeho návrhu (km. normálu) nepoužíval zesilovač za integračním článkem U3 (OPA228). Ten už může “kecat” do amplitudy řídícího napětí a tím do kmitočtu. Já jsem použil OCXO CORNING OCO100-G7, které potřebuje pro kmitočet 10 MHz 2,4096 V. Mě spíš vadí, že nikomu nevadí, že z příjmače GPS vychází pouze 1 MHz s napětím 3,84 Vpp! Tím pádem cpu do vstupu IC3B (Váš případ) do pinu 4 pouze 3,84 Vpp a do vstupu pin 5 pak 5 Vpp. A navíc nejsou oba obdélníky na vstupu 86 zrovna naprosto stejné. Když tam zařadíte před vstupy IC3B vhodný schmiťák, tak dostanete na vstupu 86 naprosto stejné signály, co do tvaru, tak i napětí a navíc napětí na C24 hned stoupne nad 3 V, které máte teď k dispozici. Odpadne “podezřelý” zesilovač, který má přímý vliv na stabilitu kmitočtu. Vám se sice hodí 10 MHz OCXO, ale pro běžné amatéry stačí přesnost na 9. místě a tak se nabízí použít TCXO 1 MHz jehož kmitočet “znormalizuji” těmi schmiťáky společně s napětím GPS příjmače, šupnu to do 86, pak na integrátor s vhodnou konstantou a pak hned zpět do TCXO 1 MHz. Krásně jednoduché a stejně stabilní, jako OCXO, protože pokud je připojen příjmač GPS, tak je jedno zda mám použité OCXO nebo TCXO. Navíc TCXO má podstatně kradší časy náběhu. Pokud by jste chtěli ten čítač provozovat bez připojeného příjmače GPS, tak pak je nutné OCXO a to hodně dobré – nejlépe s dvojitým vyhříváním!
Ještě k tomu šumu. To není ani tak šum v příjmaném signálu GPS jako jeho záměrné kmitočtové rozmítání frekvencí 8 Hz. Proč to rozmítají – to vědí jen bozi. Také mě není dodnes jasné, kde se bere v příjmači onen 1 MHz (dnes už prý umí nová NEO i 10 MHZ), když v signálu GPS žádný dělitelný podobný kmitočet není. Kde je ta zázračná dělička, co vyrobí ten 1 MHz? Čerti vědí…. Promiňte zakecání K.
Zdravím,
co se týče operačního zesilovače U3 (OPA228), tak ten byl konstrukční nutností. Oscilátor Trimble 34310 má napětí potřebné k naladění na 10MHz cca 7,7V (dle verze a stáří), takže by se bez napěťového zesílení nepodařilo zavěsit PLL. To že by příliš “kecal” do napěťové amplitudy si nemyslím, cíleně jsem použil OZ od Texas Instruments verze “BurrBrown” který má napěťový offset 75µV, což je cca 2 řády pod úrovní stability VCO napětí. I kdyby byl použit daleko “horší” OU nevadilo by to. Navíc je chyba konstatntí a napětí se vždy dostaví tak, aby byl kmitočtový rozdíl z Trimble OCXO a GPS co nejmenší. Ale máte pravdu že pokud bych použil jiný OCXO, napěťový zesilovač ny nemusel být třeba vůbec.
Teď k obdélníkům na vstupu IC3B, hradlo XOR se bude otevírat stejně se Schmittovým klopným obvodem, nebo bez něj. Napětí sice trochu rozdílná jsou, ale stále je to hluboko uvnitř hraničních napětí pro LOG 1 a 0. Rozdíl v tvaru průběhu jsem nepozoroval. Máte pravdu že by stačil TCXO oscilátor, já volil OCXO Trimble z důvodu jeho malé ceny a také proto, že je vážně poctivě udělaný. Konstrukční chyba která v našem čítači bohužel je, tedy že bez přítomnosti GPS synchonizace se OCXO značně rozladí (cca na to deváté místi za desetinou čárkou) by šla řešit přepínáním ladícího napětí. Nebo jeho generováním pomocí DAC řízeného CPU.
Z mých měření se jevil šum GPS signálu jako relativně velký problém, chyba dosahovala cca 2% periody signálu a bylo to poznat. Nevím kde jste měřil to rozlaďování o 8Hz, já nic podobného nezaznamenal. Navíc mám ověřené že pokud nastavím kmitočet generovaný pomocí GPS byť jen o 1Hz jinak, PLL se již nikdy nezavěsí, chyba je příliš velká.
Máte pravdu že signál a data GPS jsou záměrně “znepřesňována”, toto se děje z čistě bezpečnostních a strategických důvodů. Do signálů v civilním pásmu L1 – 1575,42MHz (v současné době, plánuje se zde poskytovat i military) se záměrně vkládá chyba a ta může být dle potřeb poskytovatele různě velká. Dalším přikladem omezení je nemožnost použít GPS se signály pouze v L1 pásmu na objektech, které se pohybují rychlostí vyšší než cca 800km/h – například balistická raketa 🙂 Při vojenských akcích USA se na cílových destinacích chyba navíc zvyšuje, tak aby nemohlo být GPS polohování zneužito nepřítelem. Pásmo L2 – 1227,6MHz slouží pro přenos “military” části a je možno pomocí těchto “dodatečných” dat získat polohu výrazně přesněji. Zatím se mi nepodařilo dohledat způsob jak se přesně generuje referenční kmitočet který poskytuje GPS přijímač.
Ahoj
Měl bych dotaz k zapojení. Jednak předpokládám že nemáš ve schematu změnu referenční frekvence z 1MHz na 100kHz, tj IC3B pin 5 by měl být spojen s IC4B pin 13? A další, proč jsou použity C39-R26? nevnáší další chybu? Jejich opodstatnění by bylo u konstrukcí, kde byl GPS přijímač externí, a po stejném vodiči se k němu vedlo napájecí napětí..viz například GPSDO OK1DXD. A nakonec, u U7 je možné napájení 3,3V nebo 5V. Jaké nakonec bylo použito výběrem propojkou?
Ahoj,
C39+R26 byly naprojektovány hlavně pro vývoj účely, tak aby byl k dispozici ještě jeden derivační článek – nemusí se osadit.
Dělal jsem s tím pokusy když jsem normál srovnával s rubidiovou lampou.
U7 je nakonec napájen z 3,3V, při vyččím VCC sice zvládne vyšší kmitočet – ale také více hřeje.
Michal HAZ
Ahoj. Předem musím pochválit, že projekt vypadá velmi pěkně. Já se nyní rozhýbávám taky k něčemu podobnému, ale mi bohatě bude stačit jenom 10MHz reference (GPSDO). A chci se zeptat, co tě vedlo k tomu, že jsi nepoužil pro řízení toho oscilátoru např. nějaký DAC?